Read as PDF HERE
Detecting objects underwater using multibeam echosounders presents a variety of challenges.
Typical digital terrain models made from bathymetry data incur a loss of resolution as a function of grid size which makes detailed object representation more difficult. Also, operational considerations include conflicting needs such as “real time” operator aided inspection vs. offline post processed inspection of data. In this case study we highlight the benefits of using different approaches for imaging underwater targets. The applications for these techniques support:
- Search and Recovery Operations
- Environmental/Biological/Ecological Assessment
- Navigational Support for vessels in shallow water


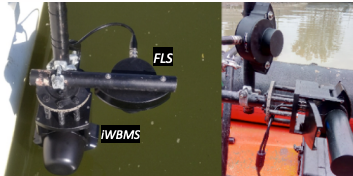
Setup
For this case study we chose a novel dual head sonar configuration consisting of a standard NORBIT FLS imaging sonar mounted with
a NORBIT iWBMS mapping kit. Both sonar heads were connected to a single SIU topside and run from NORBIT GUI software
(v10.4.X) simultaneously. The surveys were conducted from a RHIB vessel using a custom mounting arrangement made from
inexpensive materials. RTK was provided via cellular network.


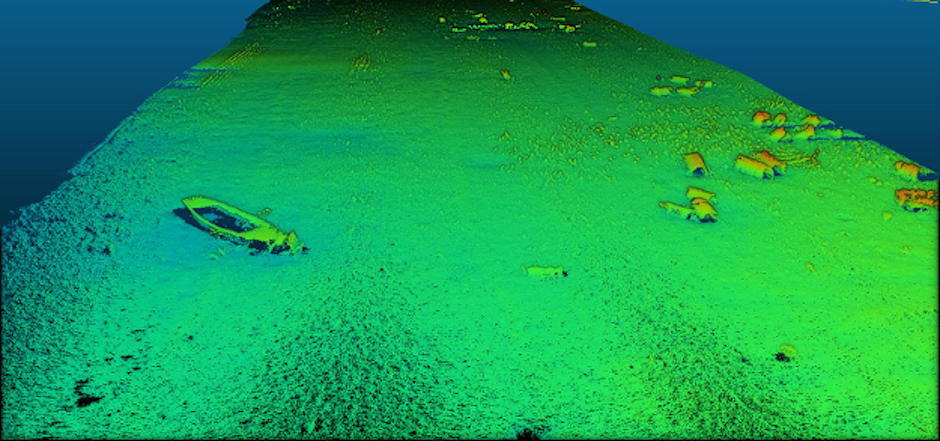
Point Clouds VS. DTM
In this example we highlight the difference between a DTM and a Point Cloud representation of small and medium sized complex
objects.
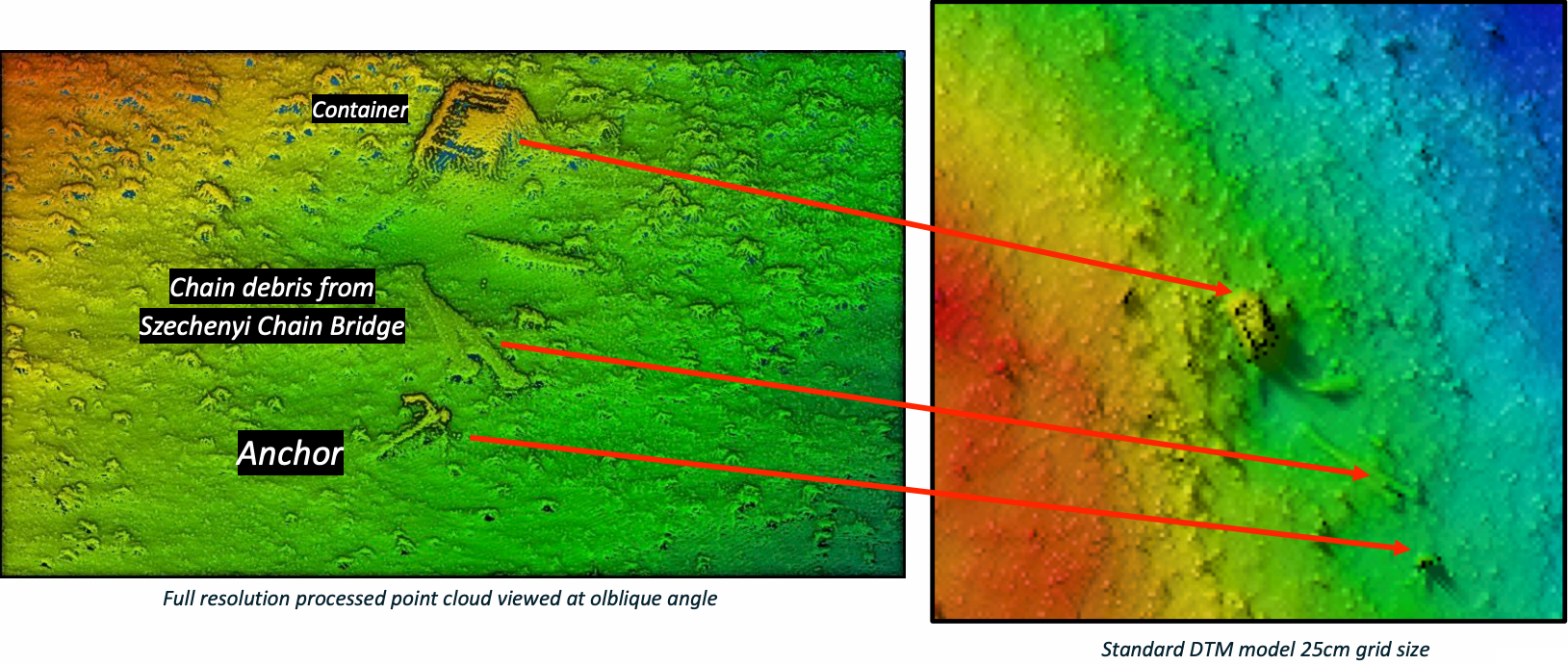
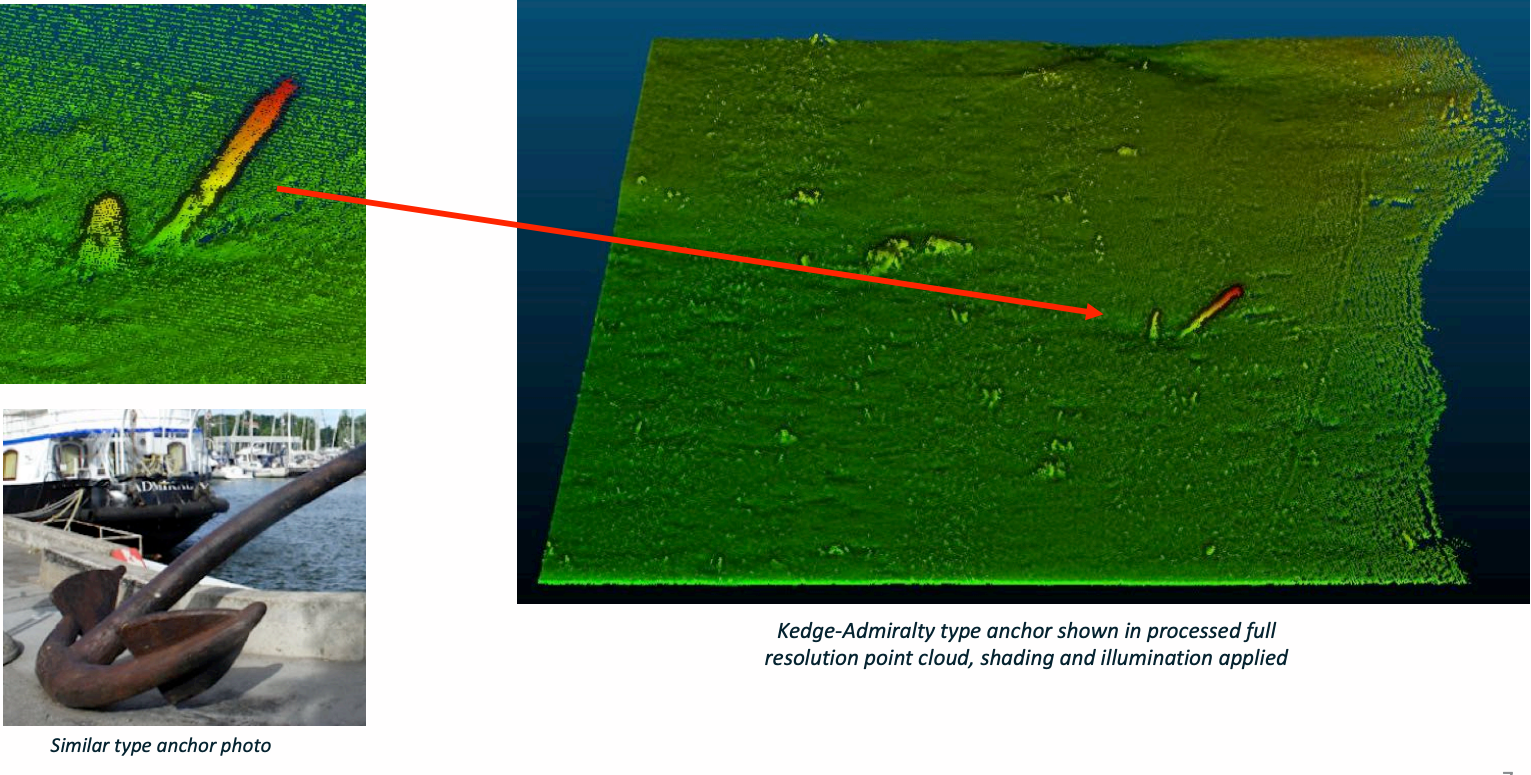
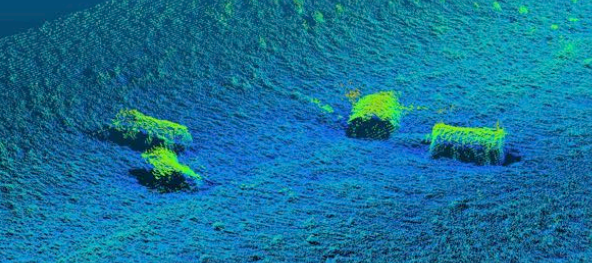
Full resolution point clouds typically preserve the complex structure of small objects as shown below:

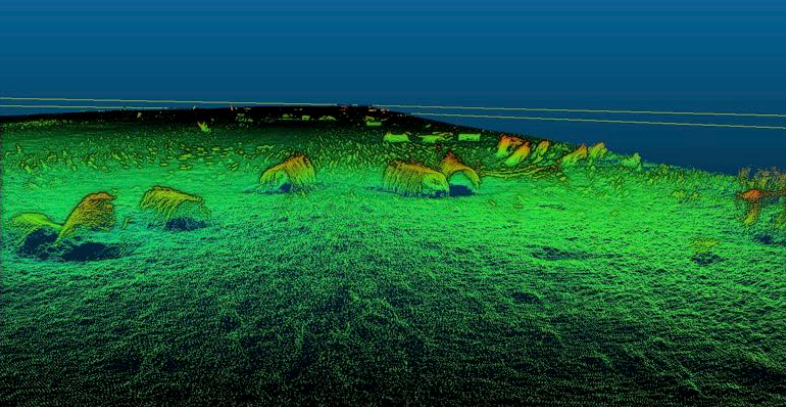
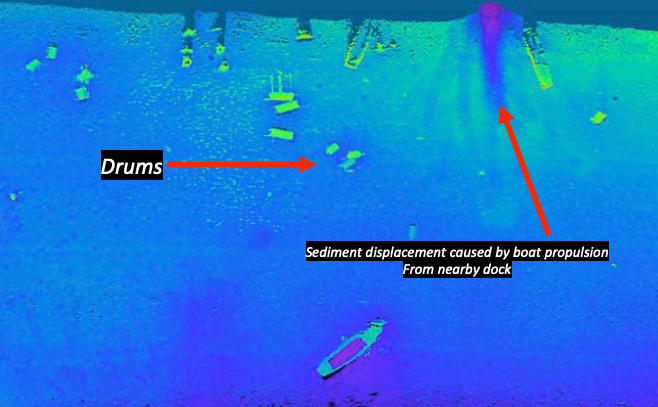
Environmental Assessment: Industrial drums


These storage drums were located near a popular fishing location. Full resolution point cloud data allows divers to have the maximum level of detail required to plan and support safe inspection and recovery.


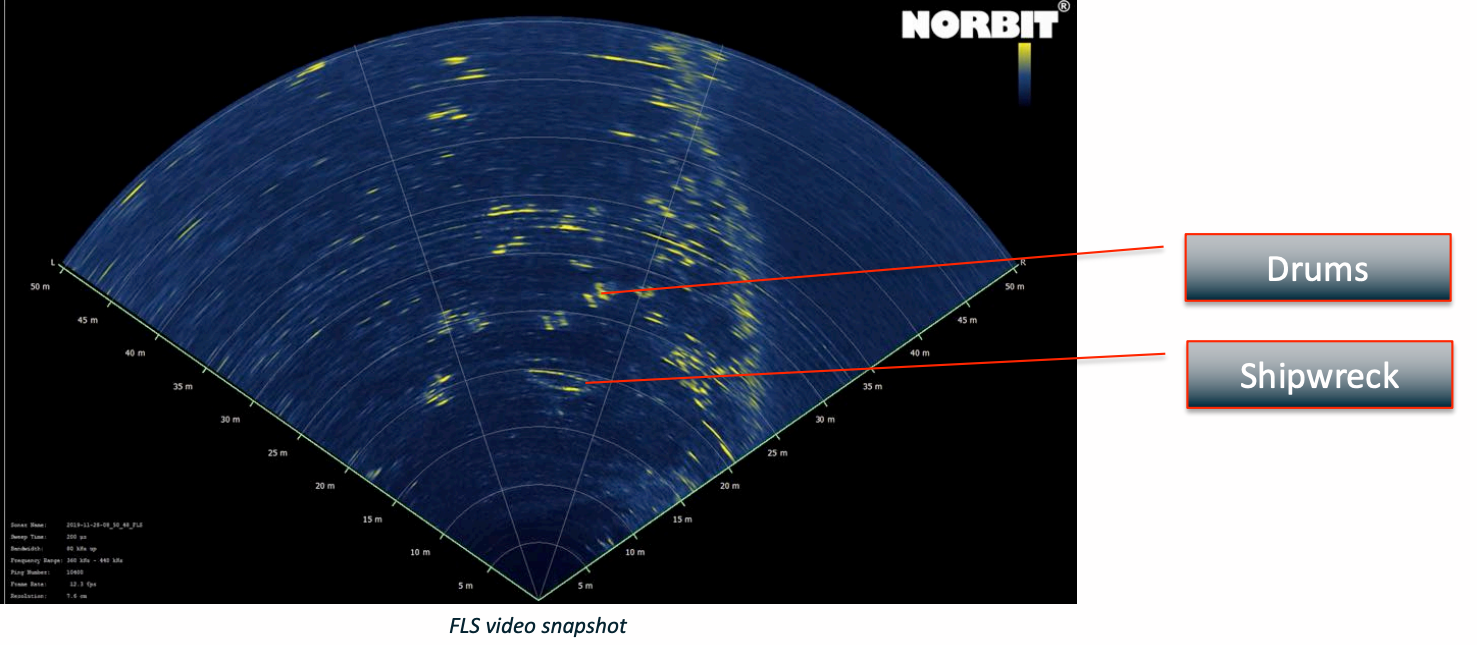
Drums in riverbed with FLS
Forward Looking SONAR (FLS) images also provide a unique representation of objects ahead of the vessel.
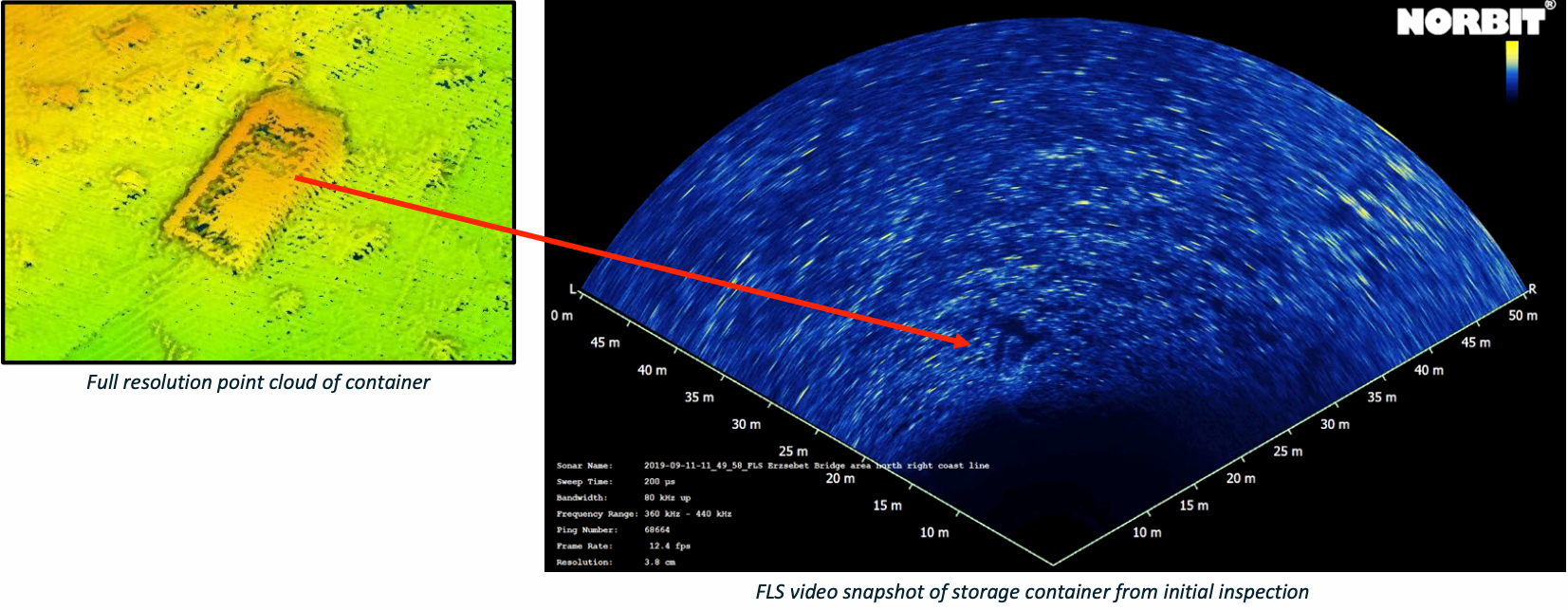
Lost containers, unknown contents
Lost shipping containers present a unique challenge for recovery. This container was inspected as a potential store for WWII ammunition. Understanding the detailed orientation of the structure, how it lays, and the distribution of debris surrounding it is critical for safe recovery efforts.
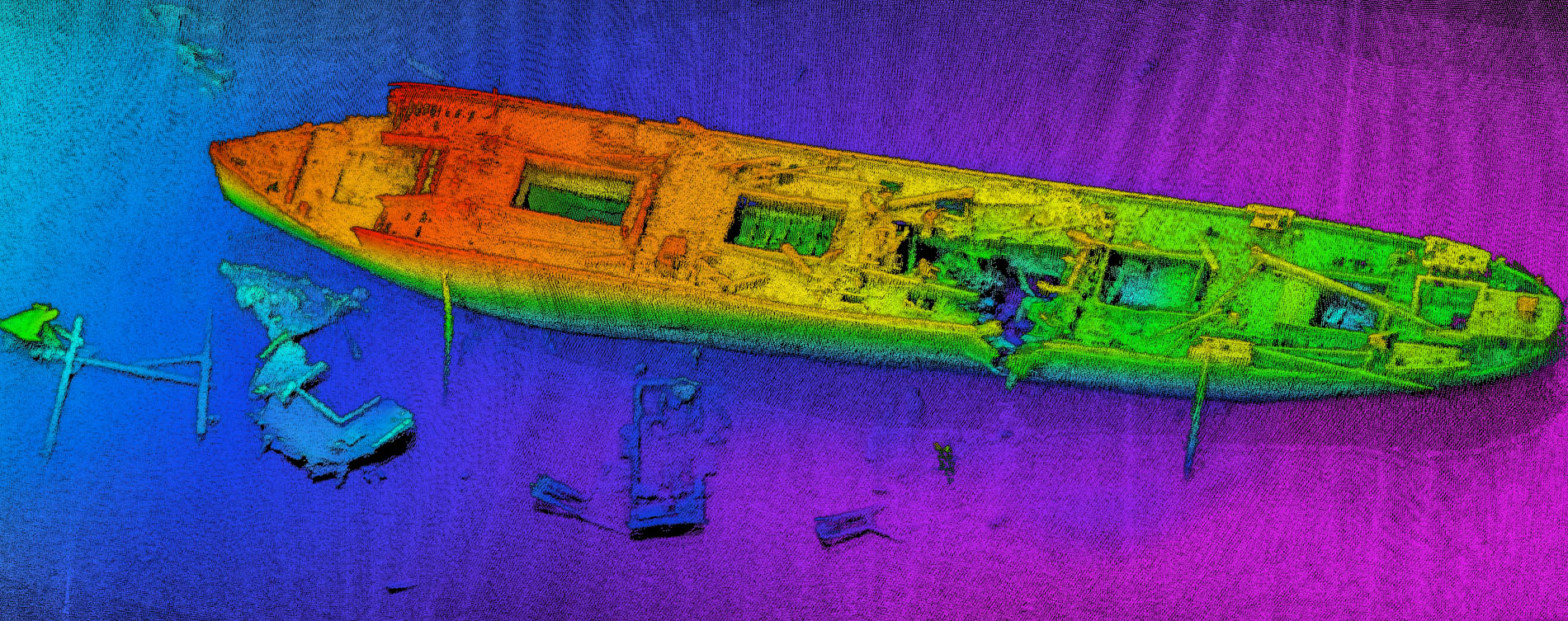
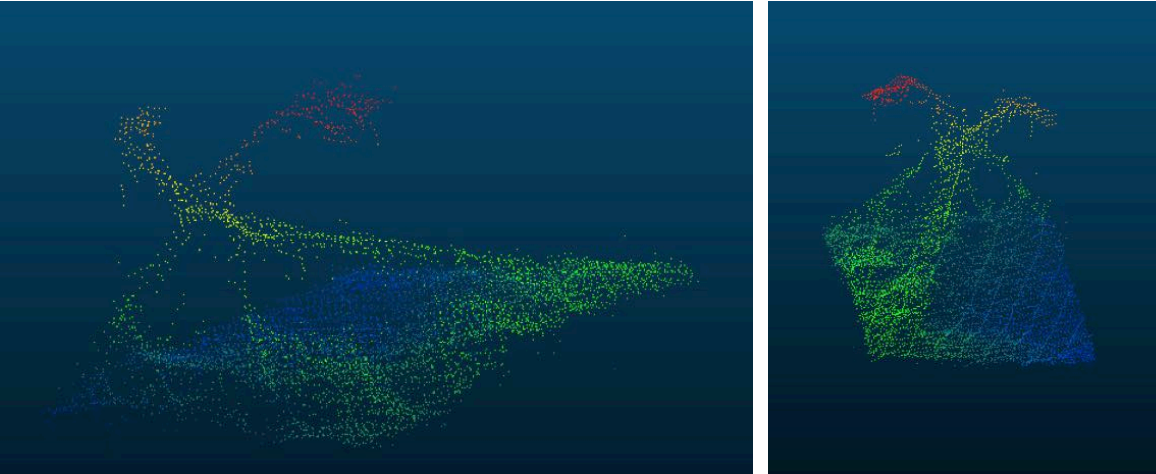
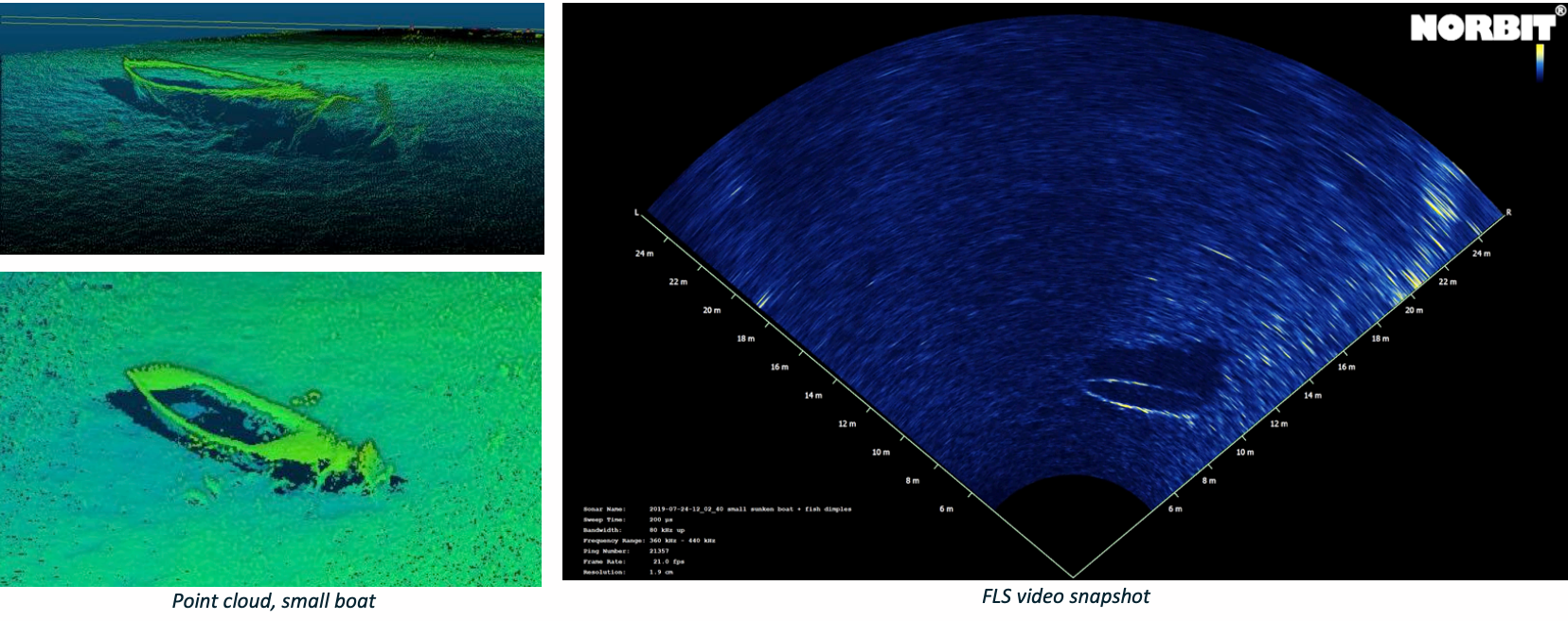
Small sunken boat
Shipwrecks are a classic target for representing underwater structure and detailed objects. In this example we see a small fishing boat imaged using both mapping and imaging sonar modes.
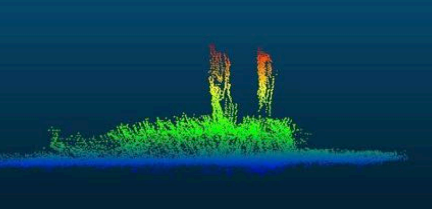
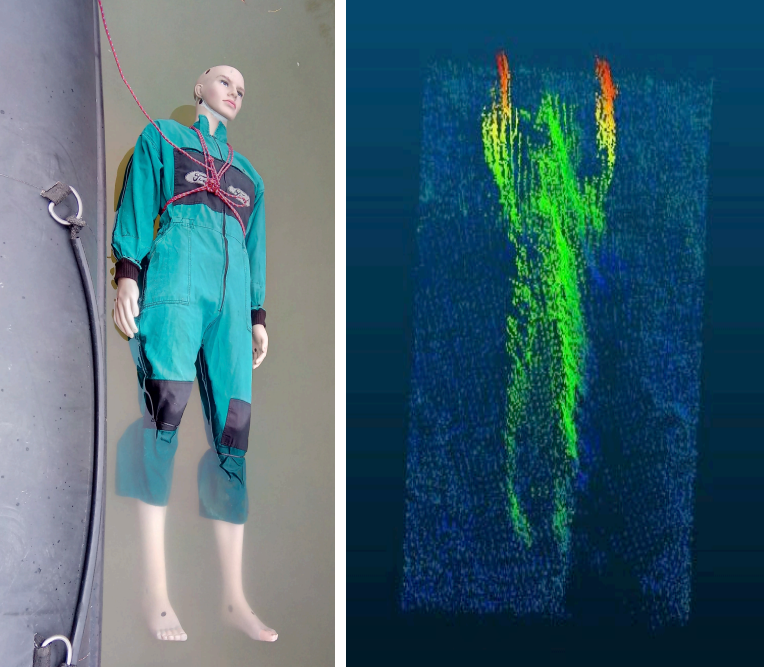
Mannequin Imaging
Search and recovery in maritime operations includes the location and identification of human forms. In this example we experiment with detection of human forms in the mapping data.
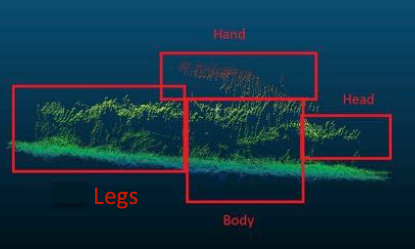
(mannequin) laying sideways on
the riverbed, also using 700kHz
with side scan imagery enabled.
Multidetect mode provides
enhanced detection around the
target enabling better
information about its structure.
Water depth: 1.6 – 1.8 meters
Underwater visibility: 0 – 30cm
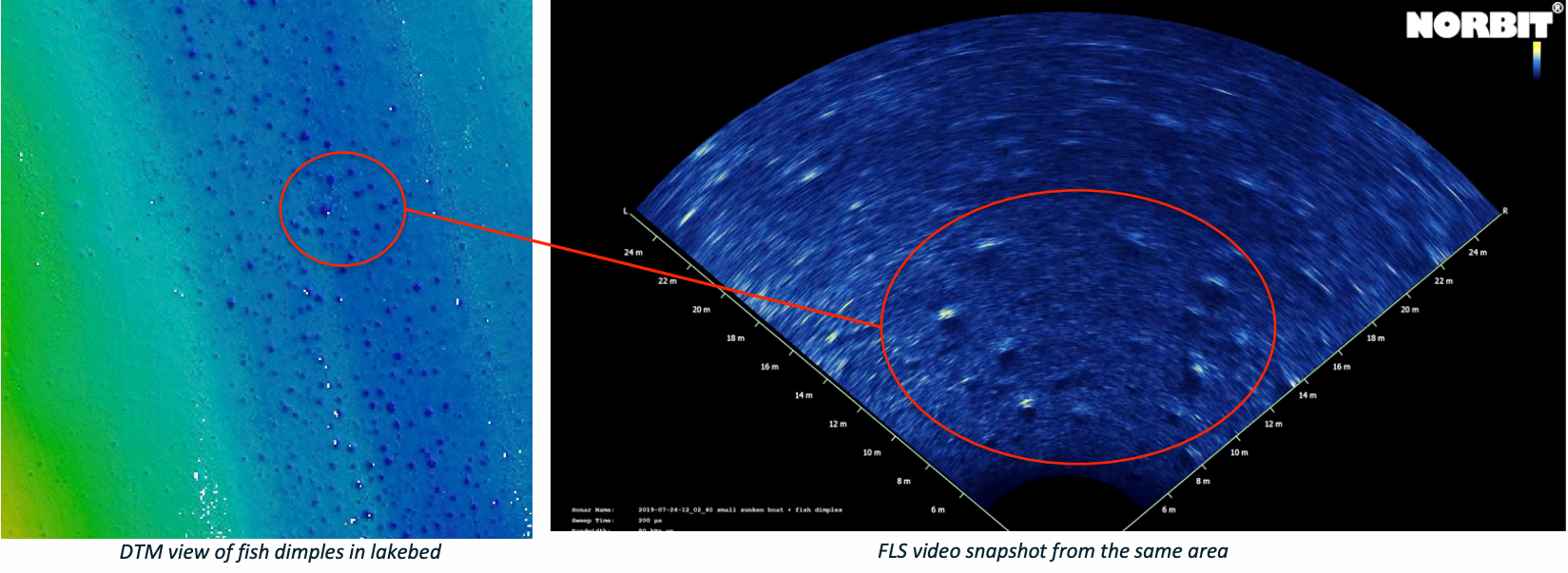
Fish and Fish “dimples”
In this example we see shallow structures created by fish burrowing into the sediment of a lakebed. This behavior creates “dimples”
which are easily detected using FLS or iWBMS modes. Analysis of these structures could help assess population density and activity.
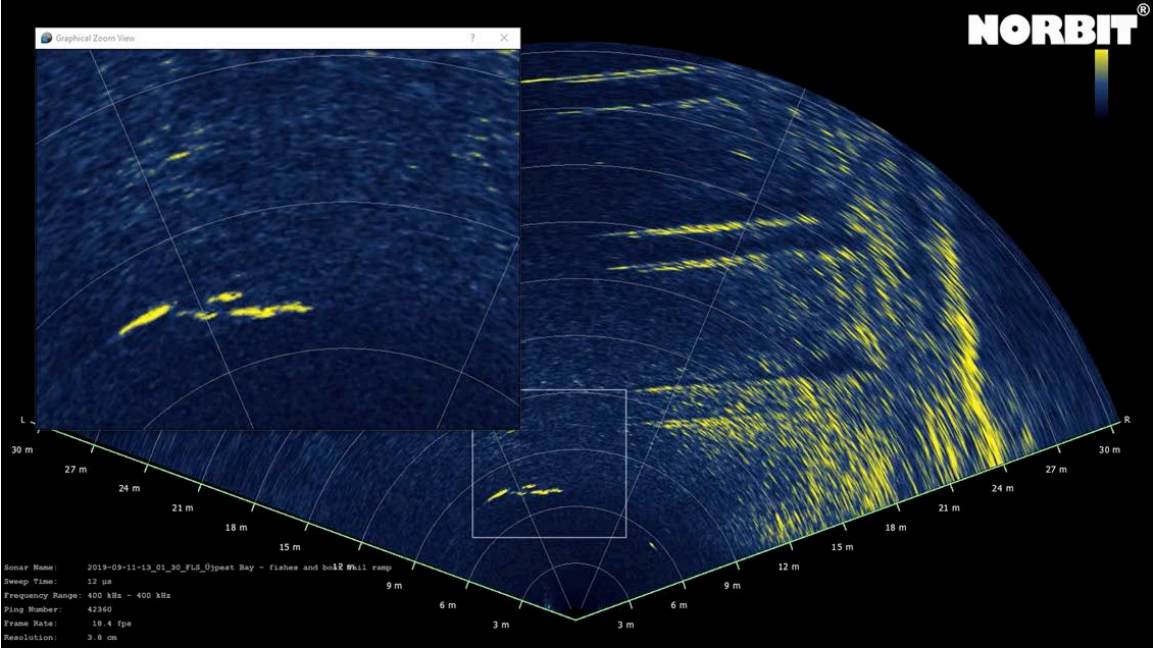
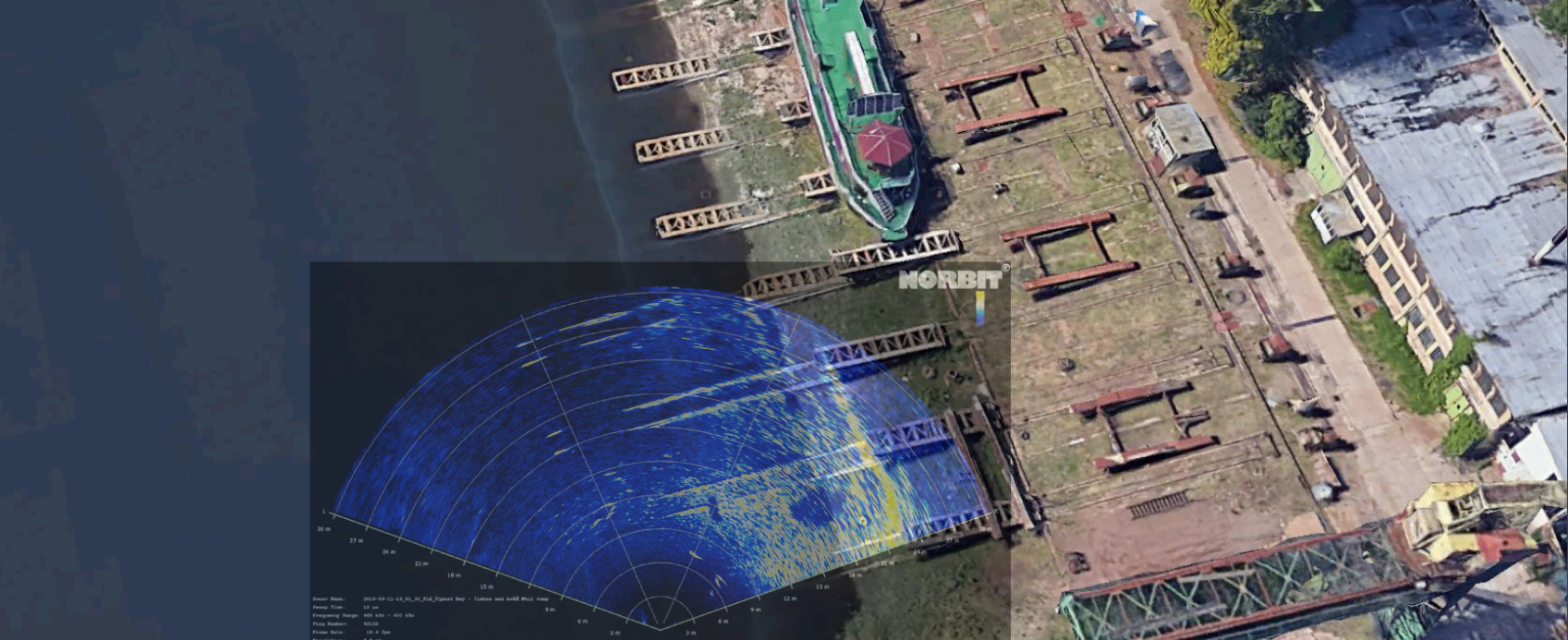
Shallow Water Navigation
In this example an FLS is used to maneuver around complex underwater structures in very shallow water (1-2m max). By Combining
Google images with real time FLS an operator can easily navigate a reasonable path through a dense obstacle field. This example
shows boat launch ramps from a decommissioned shipyard which is sometimes used for illegal dumping of waste and is located near
residential fishing areas.

Fusing Imagery – FLS and Satellite Images
Fish Detection at boat ramp
Forward Looking SONAR (FLS) images also provides a unique way to catch fish during operational down time.